Unlock the power of seamless business operations and generate high-quality content instantly, without breaking a sweat with Intelligent Business Solution (LiBS).
Get Started
Certified by:

Limited Offer Sign up and receive 5% bonus discount on checkout.
Unlock the power of seamless business operations and generate high-quality content instantly, without breaking a sweat with Intelligent Business Solution (LiBS).
Get Started







LiBS offer a variety of of business solution such as payment, e-commerce, accounting, HR, business, legal strategies, restaurant management and content creation.
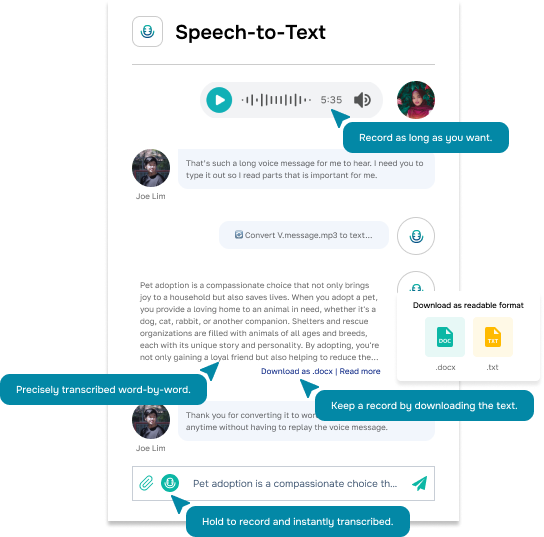
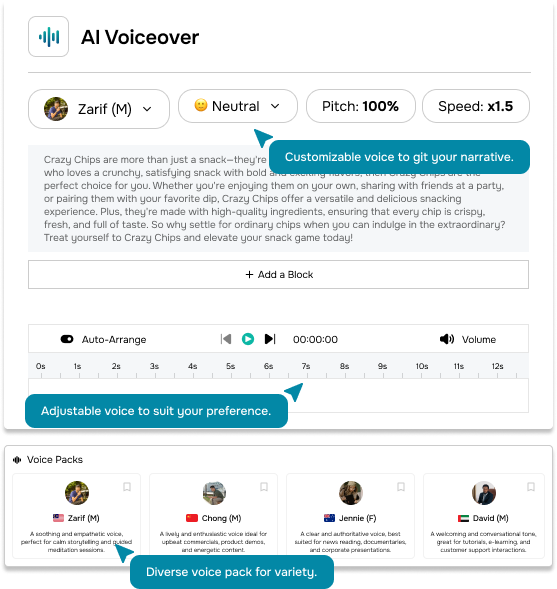
Ai Libs is designed to help you generate high-quality content instantly, without breaking a sweat.
Generate text, image, chat and even more with
Access to valuable user insight, analytics and activity.
Ability to understand and generate content in different languages
Add unlimited number of custom prompts for your customers.
Access and manage your support tickets from your dashboard.
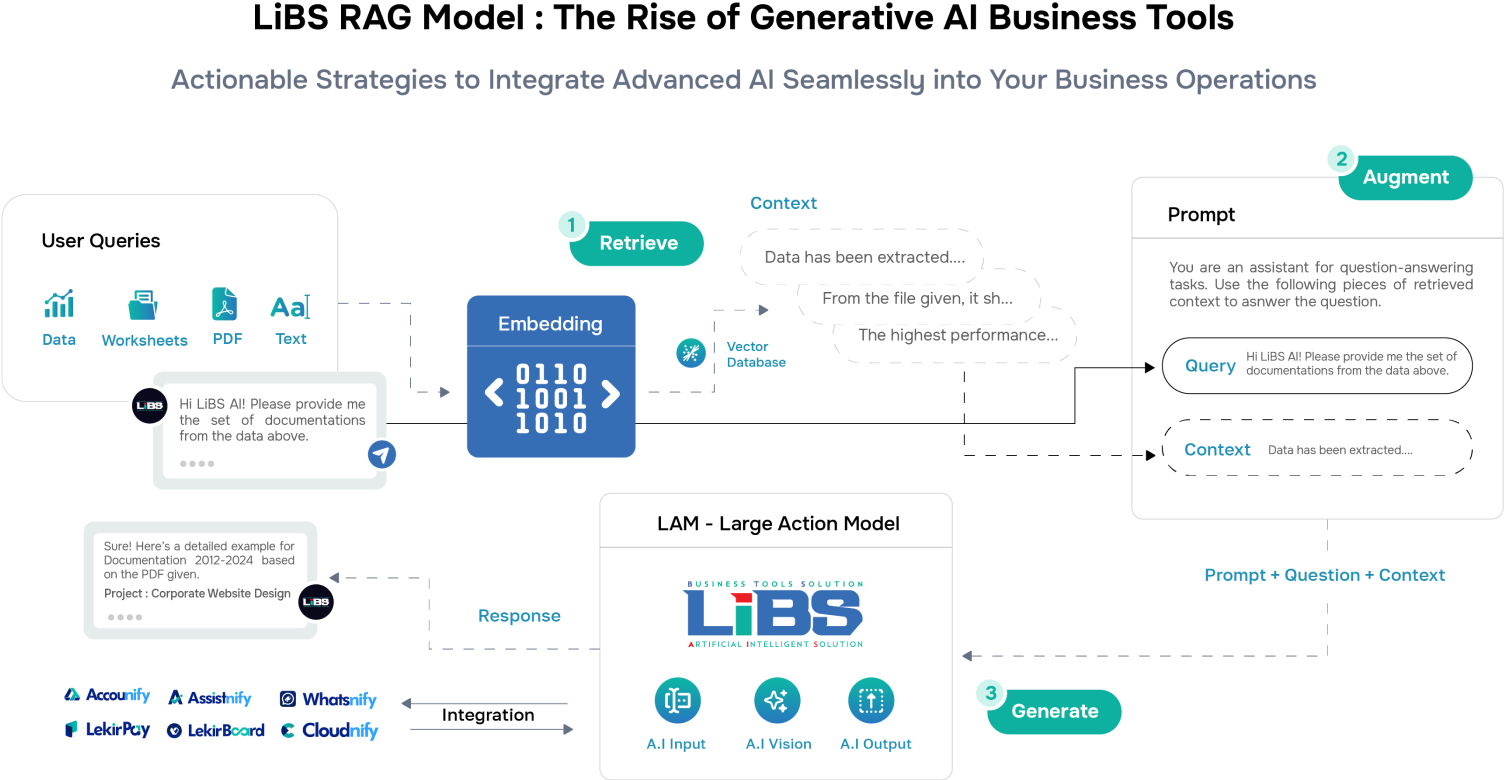
LAM refers to a comprehensive AI model designed to handle a wide range of actions or decisions, often used in complex systems where multiple variables and outcomes need to be managed simultaneously.
LiBS Business Tools provides robust solution to streamline and optimized your business processes. Learn more about LiBS business tools by clicking on each product.

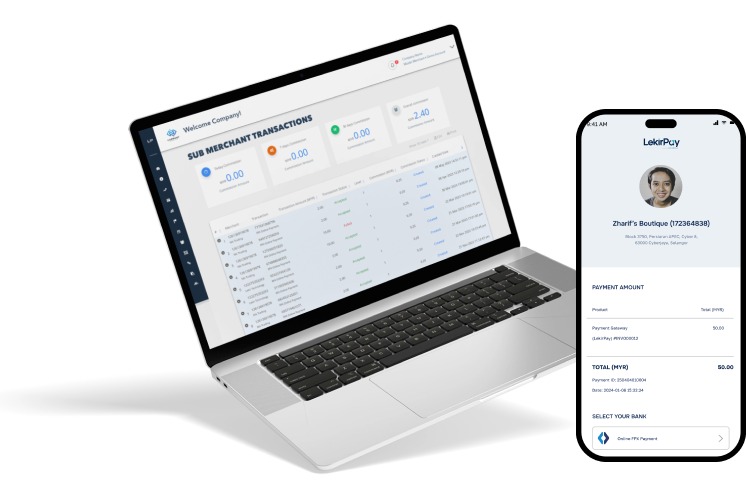
The fastest growing Malaysian Payment. We build a commoditized payment platform for business to thrive.







The all-in-one online store builder for e-commerce entrepreneurs, from managing product inventories to fulfilling orders, every aspect of your store.







A comprehensive digital accounting system that utilizes the power of A.i to assist entrepreneurs in streamlining their accounting processes.








It’s difficult to manage various tools for varying business purposes,you can manage every aspect of your business under one tool.








Whatsapp broadcast marketing tool designed to empower your brand and connect with your audience like never before.






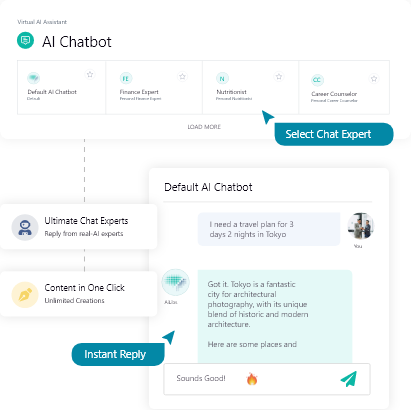
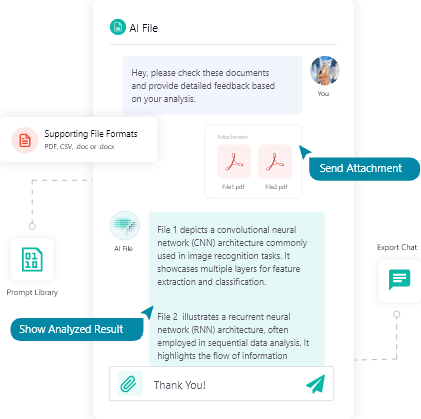
Streamlining and optimizing workflows for greater efficiency and innovation with our Ai-powered chatbot assistant.






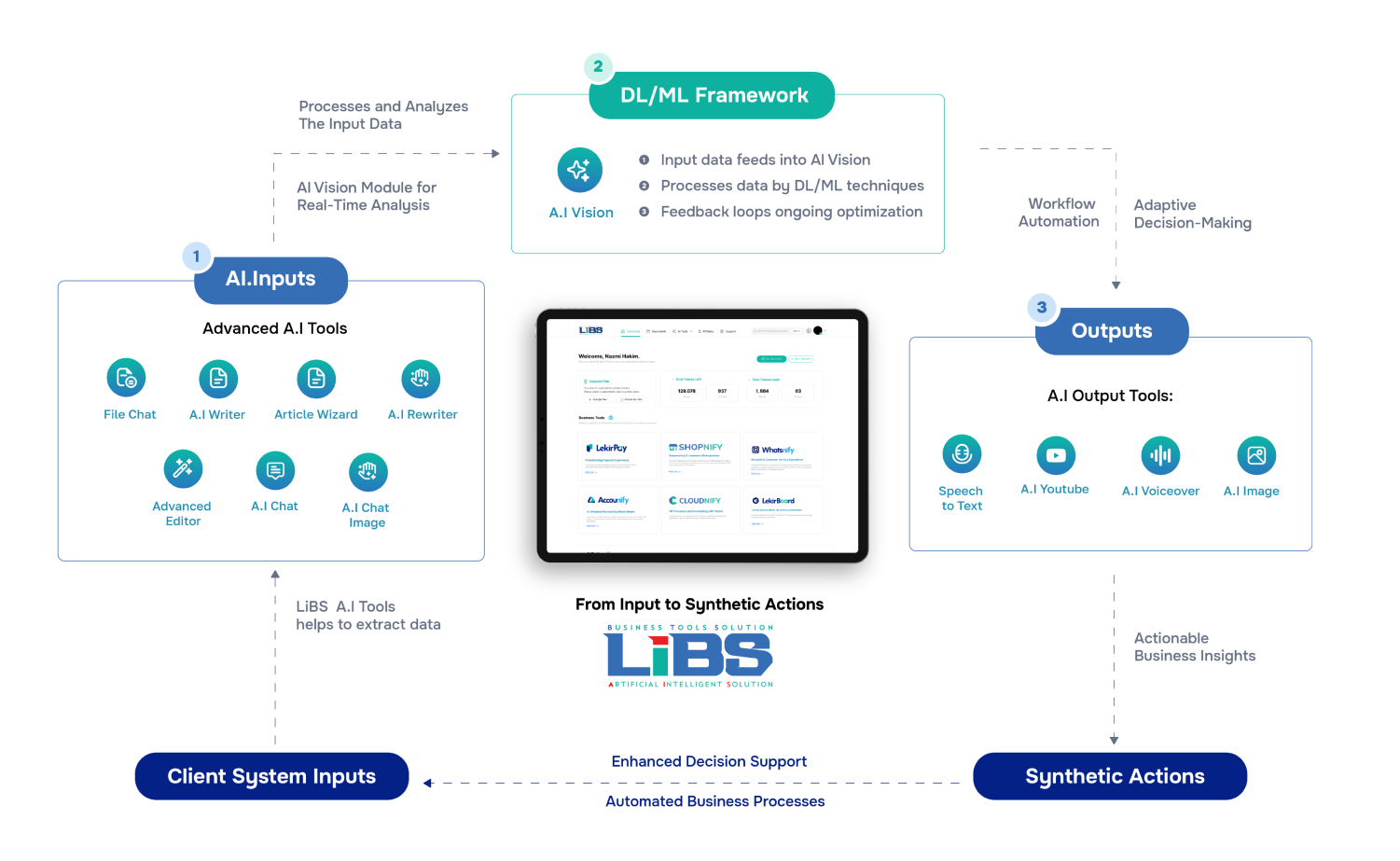
AI Libs helps streamline your business and operations system using our Mix & Match A.I Tools to meet your business objective. Our LiBS A.i Tools platform features 12 advanced AI Tools that cater to a wide range of business needs such as:
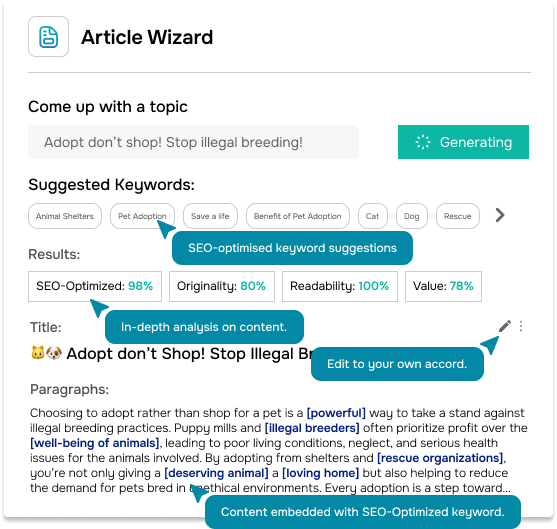
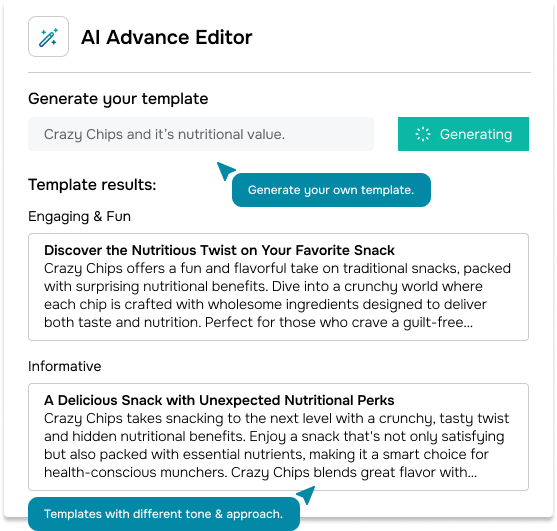
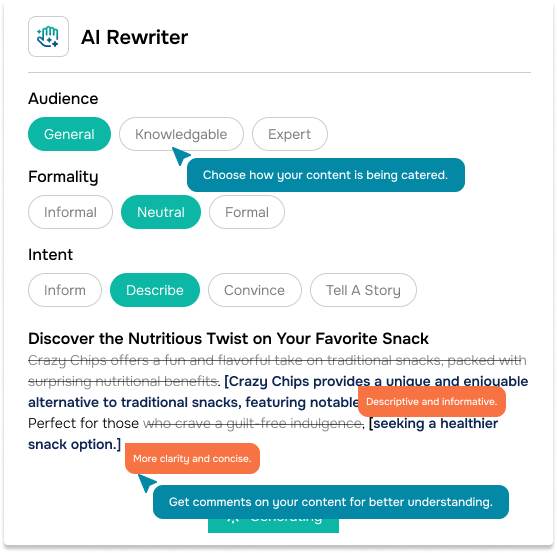
Writer is designed to help you generate high-quality texts instantly, without breaking a sweat. With our intuitive interface and powerful features, you can easily edit, export or publish your AI-generated result.
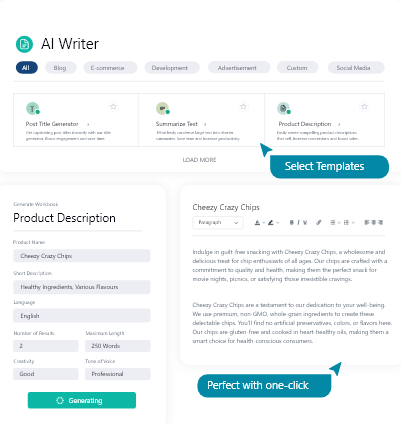
Generate, edit, export.
Powered by OpenAI.
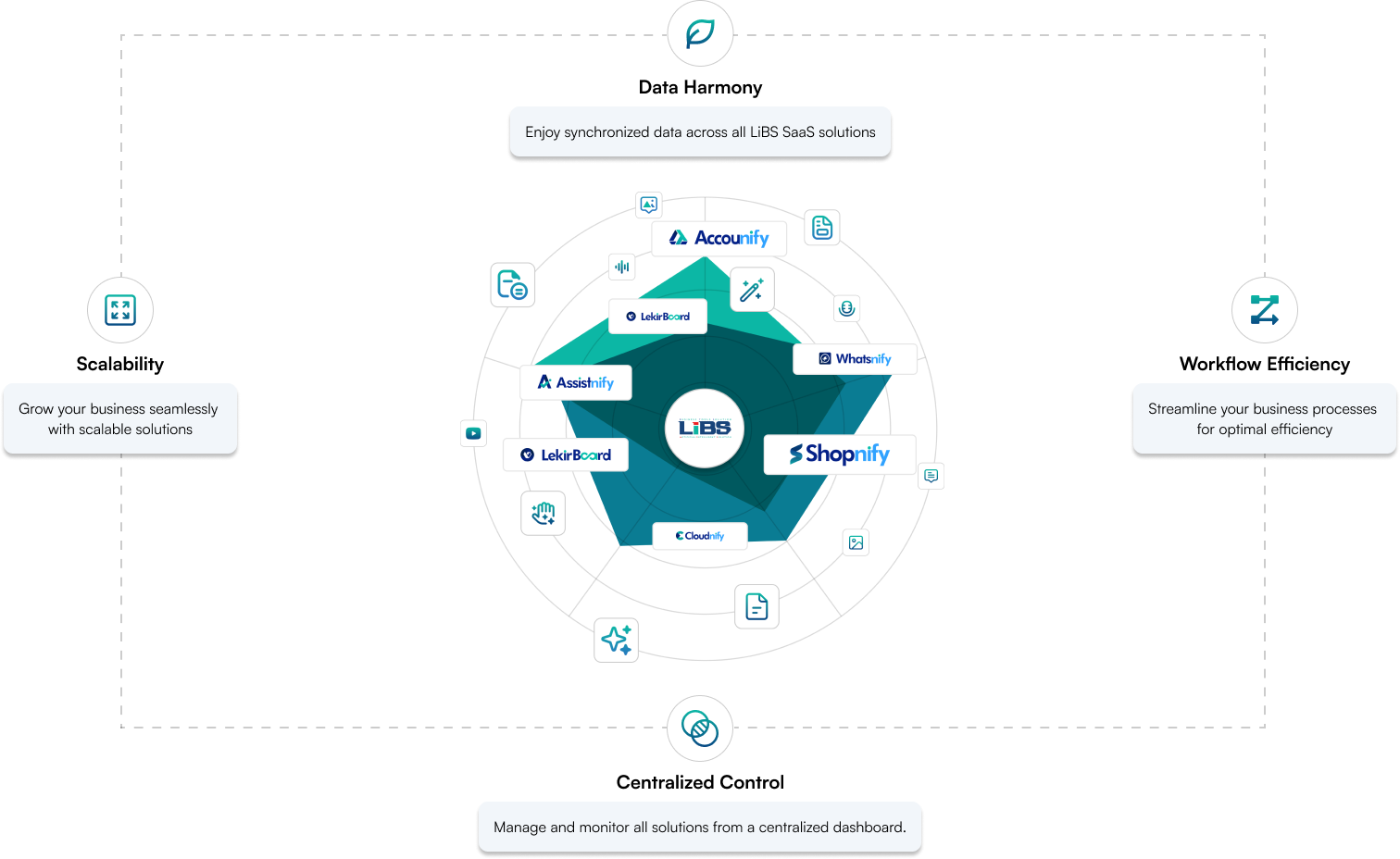
LiBS is a revolutionary network that synchronizes data across all Lekir SaaS solutions, ensuring a harmonious and efficient workflow for your business.
Simply explain what your content is about and adjust settings according to your needs.
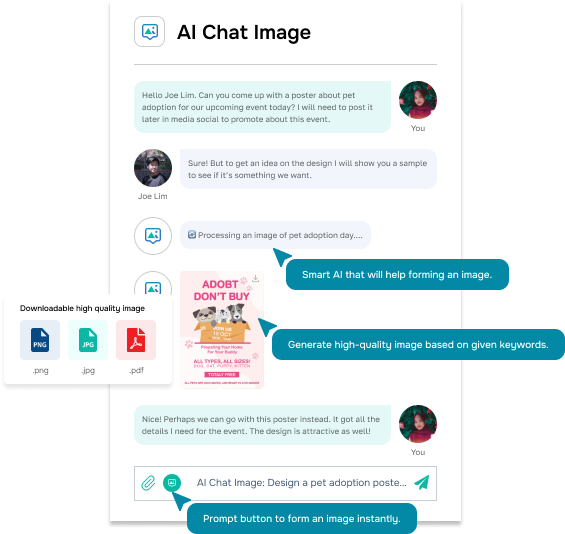
Simply input some basic information or keywords about your brand or product, and let our AI algorithms do the rest.
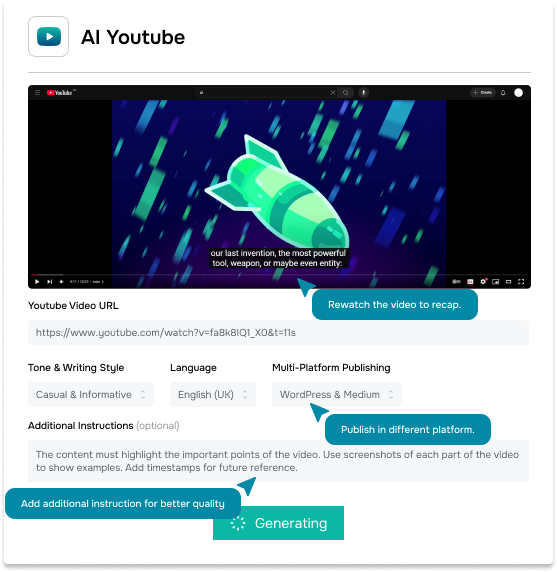
View, edit or export your result with a few clicks. And you’re done!
LiBS is a revolutionary network that synchronizes data across all Lekir SaaS solutions, ensuring a harmonious and efficient workflow for your business.
Entrepreneur
"Not only did it save me time, but it also helped me produce content that was more engaging and effective than what I had been creating on my own."

CEO
"As a freelance writer, I was looking for a tool that could help me generate ideas and write faster. This AI Text website has done that and more."

UX Designer
"The customer support team has been incredibly helpful whenever I’ve had any questions. I can’t imagine going back to my old content-creation methods!"
Pricing plans available for LiBS A.i & Business Tools. Choose the one that fits your criteria.
Explore the future of integrated business solutions with LiBS. Whether you're a startup or an established enterprise, LiBS adapts to your needs, providing a unified platform for a digitally empowered business.
Our support team will get assistance from AI-powered suggestions, making it quicker than ever to handle support requests.
Ai LIBS uses the most popular AI models such as GPT, Dall-E, Ada to create text, image, code and more within seconds. The process is simple. All you have to do is provide a topic or idea, and our AI-based generator will take care of the rest.
You can use pre-made templates and examples for various content types and industries to help you get started quickly. You can even create your own chatbot or custom prompt template for further customization.
If you plan to charge end users for the final product or service. You should buy the extended license in compliance with Ai LIBS’s terms of service same as other projects https://ai.libs.asia
Yes! Ai LIBS's multilingual capabilities apply to both content generation and dashboard language. You can easily translate it into other languages. A built-in translation tool is coming soon!
Ai LIBS provides an almost native-app experience thanks to its mobile-first approach. The entire layout is responsive and works great on any device regardless of the size.